Simulation des performances aérodynamiques d'un drone solaire à double voilure
- info39229
- 10 nov. 2017
- 4 min de lecture
Dernière mise à jour : 22 janv. 2021
Depuis quelques années, les drones (avions sans pilote) prennent une part de plus en plus importante dans le travail aérien. Ils sont en effet bien adaptés à la surveillance terrestre, maritime, de feu de forêt ou encore d'installations (lignes électriques, pipelines, raffineries…) en raison de leur grande autonomie, qui leur permet de parcourir de grandes distances, ainsi que par leurs coûts d'opération bien moindres que ceux d'un aéronef classique (avion ou hélicoptère).

C'est pourquoi la start-up française XSun, inaugurée le 6 novembre 2017, développe un drone solaire capable de rester en vol pour de très longues missions de surveillance ou de recherche. Ce drone, baptisé Solar X-One et dont les ailes sont recouvertes de panneaux solaires à l'instar sur Solar Impulse, sera capable de voler pendant plusieurs semaines, de jour comme de nuit grâce à l'utilisation de batteries. La conception à double voilure permet d'augmenter la surface alaire pour maximiser la production électrique. Elle permet également de générer de la portance (permettant une charge utile importante) tout en gardant une envergure raisonnable (~4m).

Le calcul des performances aérodynamiques d'un tel système constitue une des applications historiques de la simulation numérique CFD dans le secteur aéronautique. Un des enjeux majeurs pour déterminer avec précision les caractéristiques aérodynamiques de ce drone est la prise en compte de la transition de la couche limite laminaire en couche limite turbulente. Cette transition influe énormément dans l'estimation de la traînée (une couche limite laminaire frotte beaucoup moins qu'une couche limite turbulente). L'influence est d'autant plus importante que la vitesse de vol du Solar X-one se trouve dans le régime transitoire, puisque son Reynolds de vol se situe dans la plage [300 000, 700 000].

elsA, le code aérodynamique édité par l'Onera en collaboration avec Airbus et Safran, permet la prise en compte de façon précise de cette transition. Il s'appuie sur des maillages structurés, que l'on peut assembler en patchs recouvrants grâce à la technique chimère.
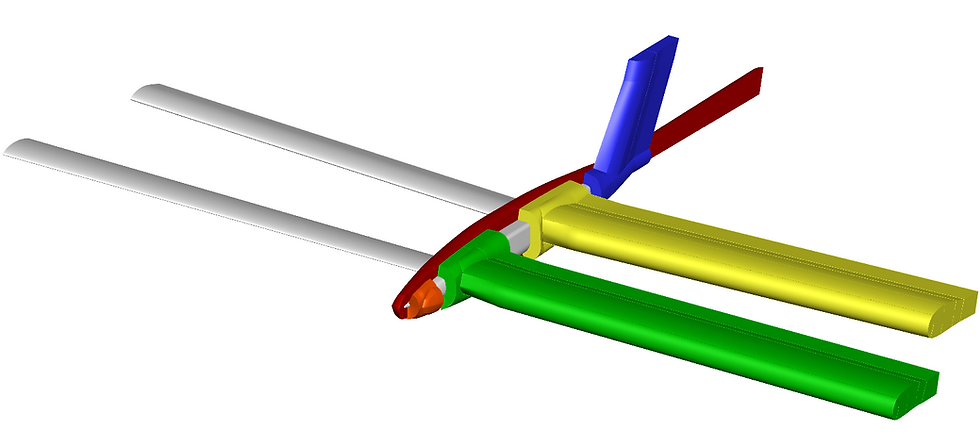
Chaque élément géométrique (fuselage, voilure, dérive, prise d'air) est maillé individuellement, sous forme de maillage structuré (et donc hexaédrique). La hauteur de première maille est de 50 microns pour une représentation fine des gradients dans la couche limite, y compris la sous-couche visqueuse (Bas-Reynolds).

Les patchs sont ensuite assemblés en utilisant les modules Cassiopée d'elsA. Cassiopée réalise les différents masquages et calculs d'interpolation inter-patchs préalables à la simulation CFD. Il permet également de générer le maillage de fond, de type octree, de façon automatique. Le maillage final pour la configuration complète compte environ 30 millions de mailles réparties sur 5 patchs.




Les images suivantes montrent une coupe du maillage dans le plan de symétrie de l'appareil. Les différents blocs sont bien visibles, notamment le fuselage (rouge), l'aile avant (vert), l'aile arrière (jaune) et la dérive (bleu) ainsi que le maillage de fond cartésien. Sur la figure de gauche, le masquage n'est pas encore calculé comme l'attestent les mailles présentes à l'intérieur de la géométrie. La figure de droite montre l'assemblage chimère une fois que le masquage est pris en compte : la géométrie est découpée proprement sur le maillage de fond et les recouvrements entre les différents maillages sont minimisés.




Les deux images suivantes mettent en évidence les recouvrements de maillages au niveau de la prise d'air et de l'aile avant, de la dérive et de l'aile arrière. Les différents maillages sont visibles ainsi que leurs recouvrements qui sont ici aussi minimisés. On remarquera le soin apporté aux recouvrements, afin que ceux-ci soient les plus uniformes possibles (taille de maille identique entre les deux maillages recouvrants) dans le but de maximiser la stabilité et la précision de la solution numérique.




La turbulence est modélisée par une approche RANS stationnaire (Reynolds Averaged Navier-Stokes) et deux modèles différents ont été utilisés :
le Spalart-Allmaras dans une de ces formes les plus récentes, SA-QCR2000 (Spalart-Allmaras with Quadratic Constitutive Relation 2000 version),
et le k-ω modifié de Kok.
La transition est modélisée grâce aux critères Onera :
Arnal-Habiballah-Delcourt (AHD) et Gleyzes dans la direction axiale,
et Arnal-Coustols pour les instabilités transversales.
Ces critères sont basés sur la théorie de la stabilité linéaire et sont efficaces dans la détermination rapide de la transition dans des écoulements présentant de faibles taux de turbulence externe (tels que les avions, drones, etc.).
L'écoulement est considéré comme totalement turbulent à l'emplanture des ailes, dans le sillage de l'hélice.
Deux schémas en espace ont également été utilisés :
le schéma centré de Jameson,
le schéma pré-conditionnée AUSMP.
De nombreux points de vol ont été étudiés afin de balayer le domaine de vol du drone. Plusieurs vitesses et angles d'attaque ont ainsi été simulés afin d'obtenir les polaires de vol (traînée, portance, finesse, moments, dérivées aérodynamiques, etc.). Des visualisations 3D ont aussi été obtenues dans le but de caractériser l'écoulement autour de l'appareil, et notamment la présence de tourbillons.
L'analyse des efforts aérodynamiques permet de montrer que l'appareil est stable (moment piqueur) en vol et présente une bonne finesse, c'est-à-dire un très bon rapport entre la portance et la traînée. En outre, cette étude a montré que le rôle de la transition était non négligeable sur les efforts avec une augmentation de la finesse de l'ordre de 25 % par rapport au régime turbulent.
Les deux images suivantes présentent des coupes dans l'écoulement de l'énergie cinétique turbulente. Les structures tourbillonnaires dues au fuselage et à la prise d'air à l'avant sont représentées sur la première image. La deuxième image montre, quant à elle, les tourbillons marginaux de bout d'aile et met en évidence l'enroulement de ces derniers de l'intrados vers l'extrados.




La connaissance des caractéristiques aérodynamiques permet de valider les performances du drone (endurance, etc.) mais aussi de qualibrer les lois de pilotage du pilote automatique.
Liens d'information :